INTRODUCTION
The Read Multiple Holding Registers Modbus RTU function (Modbus Function Code: 3), is used to read the contents of a contiguous block of holding registers in a remote device.
In this blog post, we will be reading multiple holding registers between Arduino based PLC set as client - server >
Latest Posts
MODBUS RTU
To know more about Modbus RTU and how the library works, please visit the following blog post:
HARDWARE REQUIREMENTS
B type cable , to program the Arduino based PLC
Two twisted pair cables, for RS485.
SOFTWARE REQUIREMENTS
CONNECTIONS
Now, in order to set a Modbus RTU communication, we are going to do the following:
1. Power the PLC between 12 and 24V.
2. Wire the cables through RS-485. This is based on a twisted pair cables, on cable from A+ to A+, and the other one from B- to B-.
3. Set the red switch to the Half-Duplex: HD
.jpg?access_token=98298898-085a-4ca9-8dc0-52c3e05f6054)
MODBUS RTU MASTER READ MULTIPLE HOLDING REGISTERS
In order to set an M-Duino as a master and the other one as a slave, we will have to program both to execute each code. So, in order to program the master, open up a new file of Arduino IDE, and paste the code below:
/*
Copyright (c) 2018 Boot&Work Corp., S.L. All rights reserved
This program is free software: you can redistribute it and/or modify
it under the terms of the GNU Lesser General Public License as published by
the Free Software Foundation, either version 3 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License
along with this program. If not, see <http://www.gnu.org/licenses/>.
*/
#include <ModbusRTUMaster.h>
// Define the ModbusRTUMaster object, using the RS-485 or RS-232 port (depending on availability)
#if defined HAVE_RS485_HARD
#include <RS485.h>
ModbusRTUMaster master(RS485);
#elif defined HAVE_RS232_HARD
#include <RS232.h>
ModbusRTUMaster master(RS232);
#else
ModbusRTUMaster master(Serial1);
#endif
uint32_t lastSentTime = 0UL;
const uint32_t baudrate = 38400UL;
////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() {
Serial.begin(9600UL);
// Start the serial port
#if defined HAVE_RS485_HARD
RS485.begin(baudrate, HALFDUPLEX, SERIAL_8E1);
#elif defined HAVE_RS232_HARD
RS232.begin(baudrate, SERIAL_8E1);
#else
Serial1.begin(baudrate, SERIAL_8E1);
#endif
// Start the modbus master object.
// It is possible to define the port rate (default: 19200)
master.begin(baudrate);
}
////////////////////////////////////////////////////////////////////////////////////////////////////
void loop() {
// Send a request every 1000ms
if (millis() - lastSentTime > 1000) {
// Send a Write Single Register request to the slave with address 31
// It writes the value of 1000 to the register starting at address 0
// IMPORTANT: all read and write functions start a Modbus transmission, but they are not
// blocking, so you can continue the program while the Modbus functions work. To check for
// available responses, call master.available() function often.
if (!master.readHoldingRegisters(31, 0, 3)) {
// Failure treatment
}
lastSentTime = millis();
}
// Check available responses often
if (master.isWaitingResponse()) {
ModbusResponse response = master.available();
if (response) {
if (response.hasError()) {
// Response failure treatment. You can use response.getErrorCode()
// to get the error code.
Serial.print("Error ");
Serial.println(response.getErrorCode());
} else {
// Get the discrete inputs values from the response
if (response.hasError()) {
// Response failure treatment. You can use response.getErrorCode()
// to get the error code.
Serial.print("Error ");
Serial.println(response.getErrorCode());
} else {
Serial.print("Holding Register values: ");
for (int i = 0; i < 3; ++i) {
Serial.print(response.getRegister(i));
Serial.print(',');
}
Serial.println();
}
}
}
}
}
1. Once the sketch is opened, click on Tools > Board > Industrial Shields boards > And select the M-Duino family.
2. Then, select the PLC model by going to Tools > Model > And selecting the model. In our case: M-Duino 21+
3. Select the port by going to Tools > Port > And select the port of the Arduino board.
4. Finally, either click on the arrow to upload the sketch, or go to Sketch > Upload.
MODBUS RTU SLAVE
Once the master is already programmed, we are going to do the same as with the Master PLC, but choosing the ModbusRTUSlave sketch. So:
1. Change the B type cable and connect it to the other M-Duino PLC.
2. Go to the top bar, and click on: File > Examples > Tools40 > Modbus > and select the ModbusRTUSlave sketch.
3. Once the sketch is opened, click on Tools > Board > Industrial Shields boards > And select the M-Duino family.
4. Then, select the PLC model by going to Tools > Model > And selecting the model. In our case: M-Duino 21+
5. Select the port by going to Tools > Port > And select the port of the Arduino board.
6. Finally, either click on the arrow to upload the sketch, or go to Sketch > Upload.
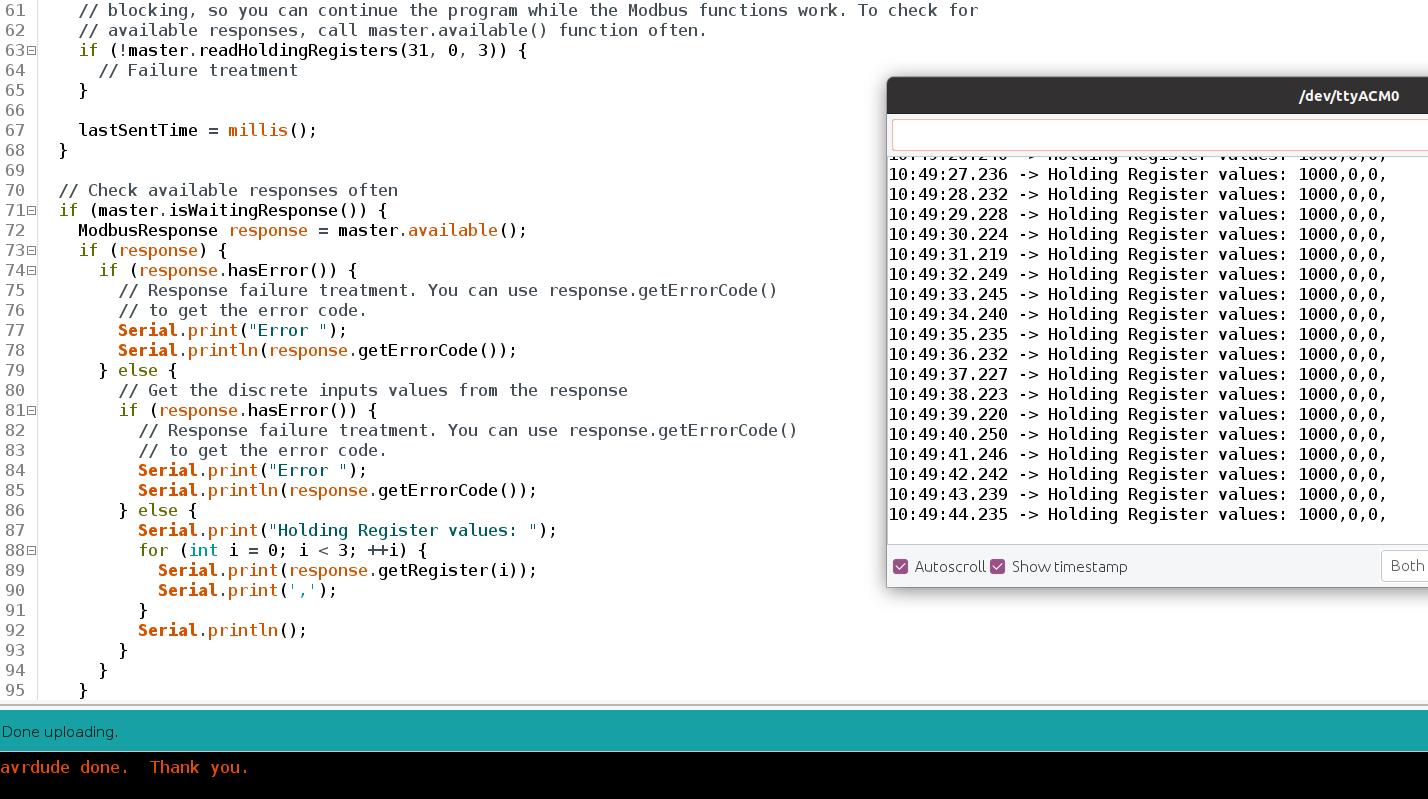
TESTING
Before following this blog post, we set a Single Holding Register > to 1000.
Now, we can see that the value of the first holding register, is 1000: